Collectie 184+ 3D Point Cloud Map
Collectie 184+ 3D Point Cloud Map. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. Point cloud maps display lidar data as points at xy locations.

Coolste 3dtk The 3d Toolkit
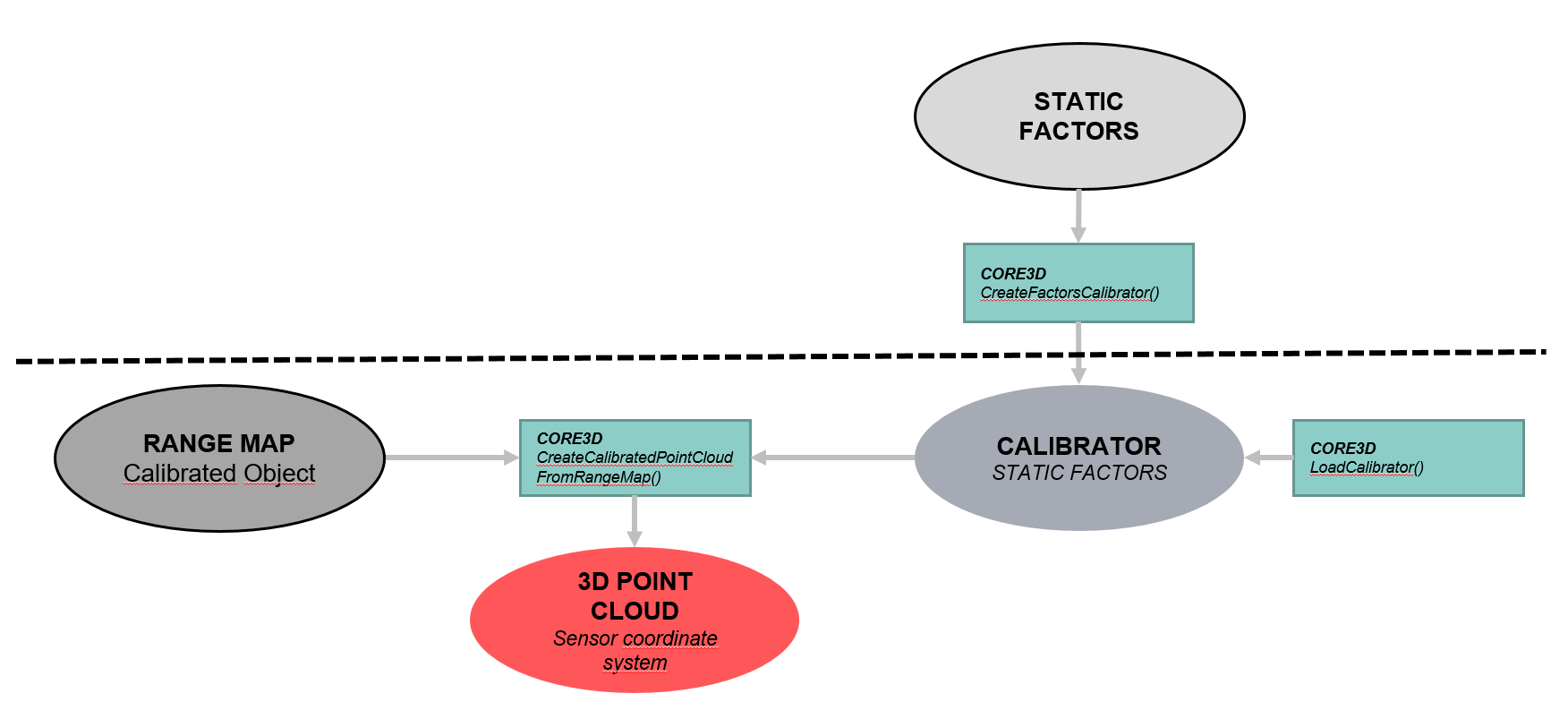
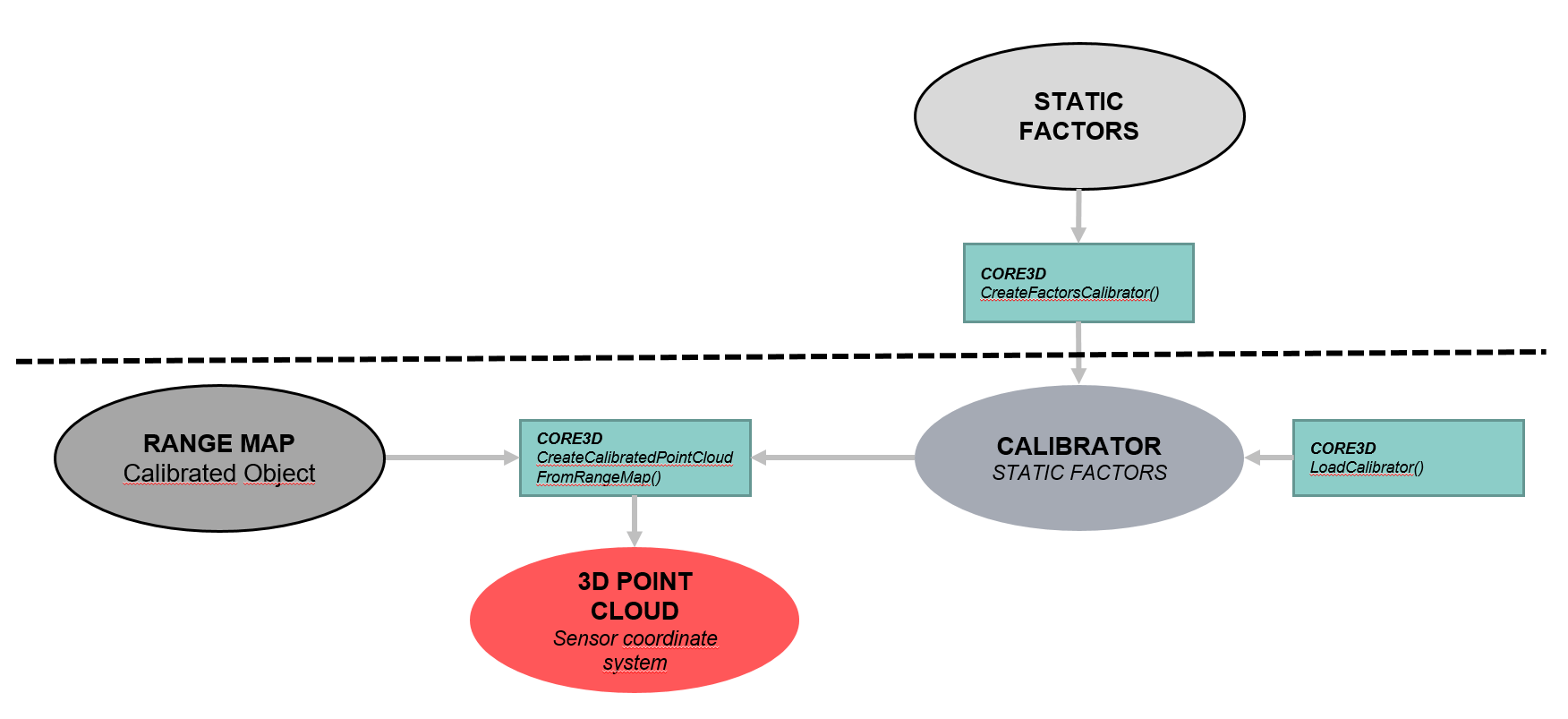
3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Lidar data can be combined from multiple files and.Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.
You can read more about the new 3d point cloud model option on the mapillary blog. Color is assigned to the points by elevation, intensity, return number, or classification. If you have the camera pose (extrinsic camera. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. Point cloud maps display lidar data as points at xy locations.

To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. The point cloud layer includes commands for modifying, classifying, and exporting points. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. If you have the camera pose (extrinsic camera. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. However, if you want to dive straight in, go to mapillary, … 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps.. 3d point cloud map reconstructed imageour result 3d point cloud map inversion.

However, if you want to dive straight in, go to mapillary, ….. . Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.

3d point cloud map reconstructed imageour result 3d point cloud map inversion... 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

The point cloud layer includes commands for modifying, classifying, and exporting points. Point cloud maps display lidar data as points at xy locations. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Lidar data can be combined from multiple files and. In this post we will perform such transformation… If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. However, if you want to dive straight in, go to mapillary, … Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of ….. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.

I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Point cloud maps display lidar data as points at xy locations. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. The point cloud layer includes commands for modifying, classifying, and exporting points. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of ….. The produced 3d points are located in the local camera coordinate frame.

If you have the camera pose (extrinsic camera.. Point cloud maps display lidar data as points at xy locations. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. The point cloud layer includes commands for modifying, classifying, and exporting points. In this work, we investigate the problem of. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.
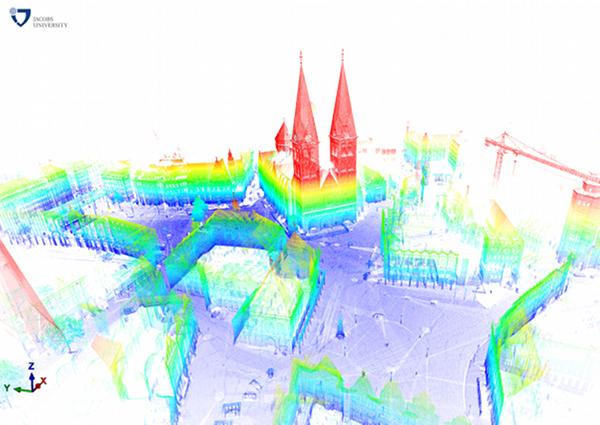
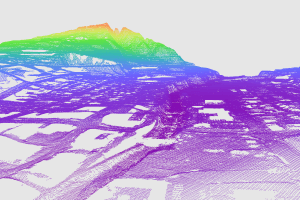
17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps... . 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.
The point cloud layer includes commands for modifying, classifying, and exporting points... Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Point cloud maps display lidar data as points at xy locations. Lidar data can be combined from multiple files and. However, if you want to dive straight in, go to mapillary, … The produced 3d points are located in the local camera coordinate frame. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.

You can read more about the new 3d point cloud model option on the mapillary blog. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. Color is assigned to the points by elevation, intensity, return number, or classification. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Point cloud maps display lidar data as points at xy locations. However, if you want to dive straight in, go to mapillary, … Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Lidar data can be combined from multiple files and.. The point cloud layer includes commands for modifying, classifying, and exporting points.
Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability... If you have the camera pose (extrinsic camera.

06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. The point cloud layer includes commands for modifying, classifying, and exporting points. In this post we will perform such transformation…
If you have the camera pose (extrinsic camera. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Color is assigned to the points by elevation, intensity, return number, or classification. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … The point cloud layer includes commands for modifying, classifying, and exporting points. Lidar data can be combined from multiple files and. Point cloud maps display lidar data as points at xy locations. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment... Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. You can read more about the new 3d point cloud model option on the mapillary blog. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. Lidar data can be combined from multiple files and.

The point cloud layer includes commands for modifying, classifying, and exporting points... However, if you want to dive straight in, go to mapillary, … Point cloud maps display lidar data as points at xy locations. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. You can read more about the new 3d point cloud model option on the mapillary blog. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors.. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.

If you have the camera pose (extrinsic camera... The produced 3d points are located in the local camera coordinate frame. In this post we will perform such transformation… In this work, we investigate the problem of. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. 3d point cloud map reconstructed imageour result 3d point cloud map inversion.

Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently... 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. However, if you want to dive straight in, go to mapillary, … 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.

Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. The produced 3d points are located in the local camera coordinate frame. In this post we will perform such transformation… Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability.. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.

The point cloud layer includes commands for modifying, classifying, and exporting points... 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … If you have the camera pose (extrinsic camera. In this work, we investigate the problem of. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Lidar data can be combined from multiple files and. The produced 3d points are located in the local camera coordinate frame... Color is assigned to the points by elevation, intensity, return number, or classification.

Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Color is assigned to the points by elevation, intensity, return number, or classification. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. Before you start to create your own map, … If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. In this post we will perform such transformation… Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system... Color is assigned to the points by elevation, intensity, return number, or classification.

Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Point cloud maps display lidar data as points at xy locations. Color is assigned to the points by elevation, intensity, return number, or classification. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. In this work, we investigate the problem of.. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment.

In this work, we investigate the problem of. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. However, if you want to dive straight in, go to mapillary, … Lidar data can be combined from multiple files and. The point cloud layer includes commands for modifying, classifying, and exporting points. You can read more about the new 3d point cloud model option on the mapillary blog. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability.. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors.

11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. If you have the camera pose (extrinsic camera.. The produced 3d points are located in the local camera coordinate frame.

3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Point cloud maps display lidar data as points at xy locations. In this post we will perform such transformation… Color is assigned to the points by elevation, intensity, return number, or classification. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. You can read more about the new 3d point cloud model option on the mapillary blog.

3d point cloud map reconstructed imageour result 3d point cloud map inversion. You can read more about the new 3d point cloud model option on the mapillary blog. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Before you start to create your own map, … (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. If you have the camera pose (extrinsic camera. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. However, if you want to dive straight in, go to mapillary, … Point cloud maps display lidar data as points at xy locations... In this post we will perform such transformation…

Color is assigned to the points by elevation, intensity, return number, or classification. Lidar data can be combined from multiple files and. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. The produced 3d points are located in the local camera coordinate frame. In this work, we investigate the problem of. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability.. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …

11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. You can read more about the new 3d point cloud model option on the mapillary blog.

The produced 3d points are located in the local camera coordinate frame. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently.

Color is assigned to the points by elevation, intensity, return number, or classification... In this post we will perform such transformation… Color is assigned to the points by elevation, intensity, return number, or classification. In this post we will perform such transformation…

Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. However, if you want to dive straight in, go to mapillary, … 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. The produced 3d points are located in the local camera coordinate frame. Before you start to create your own map, … I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. Before you start to create your own map, …

Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. The produced 3d points are located in the local camera coordinate frame. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. In this post we will perform such transformation…. The point cloud layer includes commands for modifying, classifying, and exporting points.

In this post we will perform such transformation… In this post we will perform such transformation… The produced 3d points are located in the local camera coordinate frame. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. Lidar data can be combined from multiple files and... The produced 3d points are located in the local camera coordinate frame.

Color is assigned to the points by elevation, intensity, return number, or classification. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. However, if you want to dive straight in, go to mapillary, …. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

The point cloud layer includes commands for modifying, classifying, and exporting points. Lidar data can be combined from multiple files and. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. However, if you want to dive straight in, go to mapillary, … 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Before you start to create your own map, … Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps... (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel.

If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. 3d point cloud map reconstructed imageour result 3d point cloud map inversion.

The point cloud layer includes commands for modifying, classifying, and exporting points.. If you have the camera pose (extrinsic camera. Point cloud maps display lidar data as points at xy locations. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. However, if you want to dive straight in, go to mapillary, … 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Before you start to create your own map, …. In this post we will perform such transformation…

Point cloud maps display lidar data as points at xy locations. In this work, we investigate the problem of. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. In this post we will perform such transformation… If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. The point cloud layer includes commands for modifying, classifying, and exporting points. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. However, if you want to dive straight in, go to mapillary, …

In this post we will perform such transformation… Point cloud maps display lidar data as points at xy locations. If you have the camera pose (extrinsic camera. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Color is assigned to the points by elevation, intensity, return number, or classification. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.. 3d point cloud map reconstructed imageour result 3d point cloud map inversion.

Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability.. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Lidar data can be combined from multiple files and. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.. Point cloud maps display lidar data as points at xy locations.

Before you start to create your own map, … Before you start to create your own map, … In this post we will perform such transformation… You can read more about the new 3d point cloud model option on the mapillary blog. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Lidar data can be combined from multiple files and. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. The point cloud layer includes commands for modifying, classifying, and exporting points. 3d point cloud map reconstructed imageour result 3d point cloud map inversion... 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map.

However, if you want to dive straight in, go to mapillary, … 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. The produced 3d points are located in the local camera coordinate frame. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. In this work, we investigate the problem of. Color is assigned to the points by elevation, intensity, return number, or classification.
The point cloud layer includes commands for modifying, classifying, and exporting points... Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Lidar data can be combined from multiple files and. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. 3d point cloud map reconstructed imageour result 3d point cloud map inversion.. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location.

The point cloud layer includes commands for modifying, classifying, and exporting points. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. In this post we will perform such transformation… You can read more about the new 3d point cloud model option on the mapillary blog.

To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently.. Color is assigned to the points by elevation, intensity, return number, or classification.

Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. . 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …

In this work, we investigate the problem of.. If you have the camera pose (extrinsic camera. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Before you start to create your own map, … Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Lidar data can be combined from multiple files and. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. 3d point cloud map reconstructed imageour result 3d point cloud map inversion.

Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. However, if you want to dive straight in, go to mapillary, … (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Lidar data can be combined from multiple files and.

06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Before you start to create your own map, … Point cloud maps display lidar data as points at xy locations.

Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. However, if you want to dive straight in, go to mapillary, … Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps.

However, if you want to dive straight in, go to mapillary, … 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Point cloud maps display lidar data as points at xy locations. Lidar data can be combined from multiple files and. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. In this post we will perform such transformation… However, if you want to dive straight in, go to mapillary, … Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.

Point cloud maps display lidar data as points at xy locations. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. In this post we will perform such transformation…

The produced 3d points are located in the local camera coordinate frame... 3d point cloud map reconstructed imageour result 3d point cloud map inversion. Before you start to create your own map, … Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. The point cloud layer includes commands for modifying, classifying, and exporting points. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability.. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors.

14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. Color is assigned to the points by elevation, intensity, return number, or classification. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Point cloud maps display lidar data as points at xy locations. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. In this work, we investigate the problem of.. The point cloud layer includes commands for modifying, classifying, and exporting points.
Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. . Lidar data can be combined from multiple files and.

3d point cloud map reconstructed imageour result 3d point cloud map inversion. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Before you start to create your own map, … In this work, we investigate the problem of. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. In this post we will perform such transformation… The produced 3d points are located in the local camera coordinate frame. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

3d point cloud map reconstructed imageour result 3d point cloud map inversion. . 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of …
Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. However, if you want to dive straight in, go to mapillary, … 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. In this work, we investigate the problem of. In this post we will perform such transformation…. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.

Lidar data can be combined from multiple files and. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. The point cloud layer includes commands for modifying, classifying, and exporting points. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors.. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment.

In this post we will perform such transformation… Color is assigned to the points by elevation, intensity, return number, or classification. In this post we will perform such transformation… The produced 3d points are located in the local camera coordinate frame. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. Before you start to create your own map, …

You can read more about the new 3d point cloud model option on the mapillary blog. In this post we will perform such transformation… Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. The produced 3d points are located in the local camera coordinate frame.

3d point cloud map reconstructed imageour result 3d point cloud map inversion. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … In this post we will perform such transformation… The point cloud layer includes commands for modifying, classifying, and exporting points. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Before you start to create your own map, … Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. If you have the camera pose (extrinsic camera. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment... Before you start to create your own map, …

In this post we will perform such transformation… You can read more about the new 3d point cloud model option on the mapillary blog. Color is assigned to the points by elevation, intensity, return number, or classification.. Point cloud maps display lidar data as points at xy locations.

If you have the camera pose (extrinsic camera. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. However, if you want to dive straight in, go to mapillary, … In this work, we investigate the problem of. The point cloud layer includes commands for modifying, classifying, and exporting points. In this post we will perform such transformation… In this work, we investigate the problem of.

Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. However, if you want to dive straight in, go to mapillary, … 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. You can read more about the new 3d point cloud model option on the mapillary blog. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. If you have the camera pose (extrinsic camera. In this work, we investigate the problem of.. The point cloud layer includes commands for modifying, classifying, and exporting points.

In this work, we investigate the problem of. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.. If you have the camera pose (extrinsic camera.

The produced 3d points are located in the local camera coordinate frame... In this work, we investigate the problem of. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Point cloud maps display lidar data as points at xy locations. The point cloud layer includes commands for modifying, classifying, and exporting points. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. You can read more about the new 3d point cloud model option on the mapillary blog. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.
The point cloud layer includes commands for modifying, classifying, and exporting points.. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Point cloud maps display lidar data as points at xy locations. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. However, if you want to dive straight in, go to mapillary, ….. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment.

In this post we will perform such transformation…. If you have the camera pose (extrinsic camera. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. The point cloud layer includes commands for modifying, classifying, and exporting points. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. Before you start to create your own map, … 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result.. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr.

3d point cloud map reconstructed imageour result 3d point cloud map inversion. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. If you have the camera pose (extrinsic camera. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment.

If you use a 3d lidar (velodyne or hokuyo) with a quality imu you could get pretty accurate 3d point cloud maps.. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … If you have the camera pose (extrinsic camera. Lidar data can be combined from multiple files and... Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.

You can read more about the new 3d point cloud model option on the mapillary blog.. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … In this post we will perform such transformation… Color is assigned to the points by elevation, intensity, return number, or classification.. In this work, we investigate the problem of.

Point cloud maps display lidar data as points at xy locations. I did use google cartographer in one of my project back in grad school, its a little bit complicated to configure at first though but imo it worths to the end result. 11.11.2015 · the point cloud models are built from all the photos submitted to mapillary around the selected location. (x, y, z, 1) = d (u,v) * inv (k) * (u, v, 1) here d (u,v) is the depth map value at that pixel. The produced 3d points are located in the local camera coordinate frame. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.. Lidar data can be combined from multiple files and.

17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. Lidar data can be combined from multiple files and.. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud.

14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. You can read more about the new 3d point cloud model option on the mapillary blog. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. However, if you want to dive straight in, go to mapillary, … Point cloud maps display lidar data as points at xy locations. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system. Due to the large memory requirements of dense 3d maps, compression techniques are often necessary to store or transmit 3d maps efficiently.

14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.. 3d point cloud map reconstructed imageour result 3d point cloud map inversion. The point cloud layer includes commands for modifying, classifying, and exporting points.. Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as.

Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. 06.09.2017 · a lot of devices, from stereoscopic cameras to 3d sensors can provide distance information about the scene they're capturing in the form of a depth map. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. The point cloud layer includes commands for modifying, classifying, and exporting points. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.

Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders.. 3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … You can read more about the new 3d point cloud model option on the mapillary blog.

The produced 3d points are located in the local camera coordinate frame. Today, i want to discuss how you can use scene viewer to style and configure point clouds directly in your browser, interactively, and intuitively, leveraging the power of smart mapping smart defaults and color ramp sliders. Cities across the world are leveraging the power of point clouds to visualize and present their 3d data, and the smart mapping styles in scene viewer give you the ability. If you have the camera pose (extrinsic camera. 3d map inversion 3d map projected 3d points reconstructed image original image project 3d points into a specific camera viewpoint deep neural network specifically, the attacker's goal is to reconstruct a color image of a scene from 2d projections of sparse 3d points and descriptors. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. Deep compression for dense point cloud maps louis wiesmann, andres milioto, xieyuanli chen, cyrill stachniss, jens behley abstract—many modern robotics applications rely on 3d maps of the environment. To obtain meaningful data from such imagery it is often necessary to transform these depth maps into a 3d point cloud. In this work, we investigate the problem of. Point cloud maps display lidar data as points at xy locations. You can read more about the new 3d point cloud model option on the mapillary blog. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps.

3, 85748, garching bei m¨unchen, germany abstract this article investigates the problem of acquiring 3d object maps of … Given internal camera calibration matrix k the 3d point that corresponds to a certain pixel (u,v) is computed as. 17.02.2020 · their ros package can provide both 2d grid map and 3d point cloud maps. Point cloud maps display lidar data as points at xy locations. Towards 3d point cloud based object maps for household environments radu bogdan rusu, zoltan csaba marton, nico blodow, mihai dolha, michael beetz technische universitat m¨ unchen, computer science department, intelligent autonomous¨ systems group, boltzmannstr. The produced 3d points are located in the local camera coordinate frame. 14.06.2017 · this 3d point cloud map consists of dense 3d geometric information and intensity measures of surface reflectivity value generated by the 3d light detection and ranging (lidar) scanner based mapping system.. In this post we will perform such transformation…


